自動駕駛技術的實現,依賴于車輛對自身位置、姿態及周圍環境的精確感知與理解。其中,衛星定位模塊作為提供絕對位置信息的核心傳感器,扮演著“天眼”般的角色,是自動駕駛系統實現全局路徑規劃和厘米級定位精度的基石。其研發過程面臨著多重嚴峻挑戰,同時也孕育著廣闊的發展前景。
挑戰:精度、可靠性與復雜環境的博弈
- 絕對精度與連續可用性的矛盾:自動駕駛,尤其是高級別(L4/L5)自動駕駛,要求在復雜的城市峽谷、隧道、高架橋下等場景中,實現連續、穩定且厘米級的高精度定位。傳統單點GPS定位精度在數米級別,且信號易受遮擋和干擾。雖然RTK(實時動態載波相位差分技術)和PPP(精密單點定位)等增強技術能將精度提升至厘米級,但它們嚴重依賴穩定、低延遲的通信網絡(如地基增強站或衛星播發的改正數),在通信中斷或信號不佳區域,定位性能會急劇下降甚至失效,形成安全漏洞。
- 復雜環境下的信號挑戰:城市環境中,高樓大廈導致的多路徑效應(信號經反射后到達接收機)是定位誤差的主要來源之一,可能造成數米甚至數十米的偏差。地下車庫、隧道等場景下,衛星信號完全丟失,必須依賴其他傳感器(如慣性導航單元IMU、輪速計、激光雷達、攝像頭)進行航位推算或特征匹配定位,這對多傳感器融合算法的深度和魯棒性提出了極高要求。如何設計抗多徑天線與算法,并實現無縫、平滑、可信的GNSS/INS(全球導航衛星系統/慣性導航系統)及其他傳感器的深耦合,是研發的核心難點。
- 安全性與完整性的苛刻要求:對于關乎生命的自動駕駛系統,定位模塊不僅要“準”,更要“可信”。它必須具備完好性監測能力,能夠實時評估自身提供的定位結果的質量和風險,在出現無法滿足安全需求的誤差時(例如,信號受到欺騙或干擾),能及時向系統發出告警。研發具備高級別功能安全(如ISO 26262 ASIL-D等級)和抗欺騙、抗干擾能力的硬件與算法,是確保自動駕駛安全可靠運行的必備條件,技術門檻和成本壓力巨大。
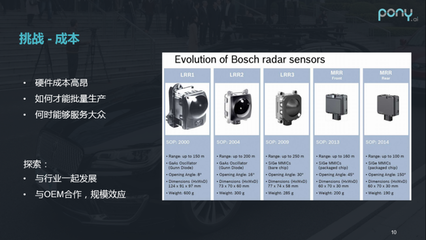
- 成本、尺寸與功耗的約束:車規級產品要求能在嚴苛的溫度、振動環境下長期穩定工作。高精度GNSS板卡、高性能IMU以及相關的加固設計會帶來較高的成本,這與自動駕駛汽車大規模商業化所需的成本控制目標存在矛盾。有限的車輛安裝空間和電氣架構也對模塊的尺寸與功耗提出了嚴格限制。
展望:多源融合與天基增強的未來之路
- 深耦合與多源融合成為標配:未來的研發方向將不再是單一的GNSS模塊優化,而是深度集成多頻多模GNSS芯片、高性能IMU(如光纖陀螺或MEMS陀螺)、車載傳感器(如輪速、方向盤轉角)以及高精度地圖匹配的“定位引擎”。通過深耦合算法,即使在GNSS信號短暫中斷時,系統也能利用IMU等數據維持高精度狀態估計,并在信號恢復時快速修正累積誤差。與視覺、激光雷達的融合,則能提供額外的相對定位和場景約束,進一步提升整體定位系統的魯棒性和準確性。
- 天基增強系統的普及與賦能:中國北斗、美國GPS、歐洲伽利略等系統都在大力發展自身的星基增強服務(如北斗的BDSBAS)。這些服務通過地球靜止軌道衛星播發廣域差分改正數和完好性信息,能夠在不依賴移動網絡的情況下,在大范圍內提供分米級甚至厘米級的實時定位服務。隨著這些服務的完善和普及,自動駕駛車輛有望獲得更穩定、覆蓋更廣的高精度定位能力,尤其在通信基礎設施薄弱的地區。
- 低軌衛星互聯網的潛在革命:SpaceX的Starlink、中國“GW”星座等大規模低軌衛星互聯網星座的部署,不僅可能提供全球無縫的通信覆蓋,其衛星本身也可作為“導航信號源”或用于輔助定位。它們可能催生全新的融合定位技術,與現有GNSS系統互補,極大增強在復雜城市環境下的信號可用性和定位精度。
- 軟硬件協同與AI賦能:專用集成芯片(ASIC)將更多定位算法硬件化,以提升處理效率和降低功耗。人工智能(AI)技術,特別是機器學習算法,將被用于更智能地識別和抑制多路徑效應、檢測異常信號(如欺騙干擾)、優化多傳感器融合權重,使定位系統具備更強的環境適應性和學習進化能力。
- 標準化與生態建設:高精度定位服務的穩定可靠供應,離不開成熟的產業生態。這包括高精度地圖的眾源更新與動態服務、車路協同系統中路側差分基站的建設、統一的定位完好性標準與評估體系等。產學研各方需通力合作,共建一個開放、可靠、安全的定位服務生態。
###
自動駕駛衛星定位模塊的研發,正從追求單一指標的“精確”走向確保全場景、全時段的“可靠、可信、可用”。挑戰雖艱巨,但隨著多源融合技術的深化、天基增強設施的完善以及AI等新技術的賦能,未來的定位模塊將更加智能、堅韌和無處不在。它將成為自動駕駛車輛在數字世界中精準錨定自身位置的“定海神針”,為安全、高效的無人駕駛出行奠定堅實的技術基石。